Divine Kinematics Calculator Omni
Projectile Motion Calculator Physics Formulas Of Class 9 Laws Thermodynamics Mcat Reddit
Projectile Motion Calculator Omni Cet Formula List Pdf Cellular Respiration And Photosynthesis Equations
Projectile Motion Calculator Mcat Physics Cheat Sheet Corrosion Of Iron Nails Experiment
Magnitude Of Acceleration Calculator Measurement Formula Pdf Authentic Shortcuts Tips And Tricks Download
Uniformly Accelerated Motion Calculator Physics Chemical Equation Combustion Physicians Formula Cover Tox Ten Discontinued
Displacement Calculator Initial Final Velocity More Aqa A Level Physics Cheat Sheet Net Books
Consider the omni-drive system of Fig.
Kinematics calculator omni. If you are looking for kinematics calculator omni you are coming to the right page. Acceleration Calculator Belt Length Calculator BMEP Calculator Brake Mean Effective Pressure Calculator Carburetor CFM Calculator Car Center of Mass Calculator Car Crash Calculator Car Jump Distance Calculator Conservation of Momentum Calculator Density Calculator Displacement Calculator Elastic Potential Energy Calculator Factor of Safety Calculator Force Calculator Free Fall Calculator. Crab steering FRC team 47 Omni wheels FRC team 67 45 3 -wheel Killough drive FRC team 857 Ball Drive FRC team 45 Mecanum-style Jester Drive FRC team 357 Andy.
Shuriken contains many images about kinematics calculator omni in total of. Define overall robot motion Usually by translation velocity rotational velocity Calculate. The kinetic energy of an object is the energy that it possesses due to its motionIt is defined as the work needed to accelerate a body of a given mass from rest to its stated velocity.
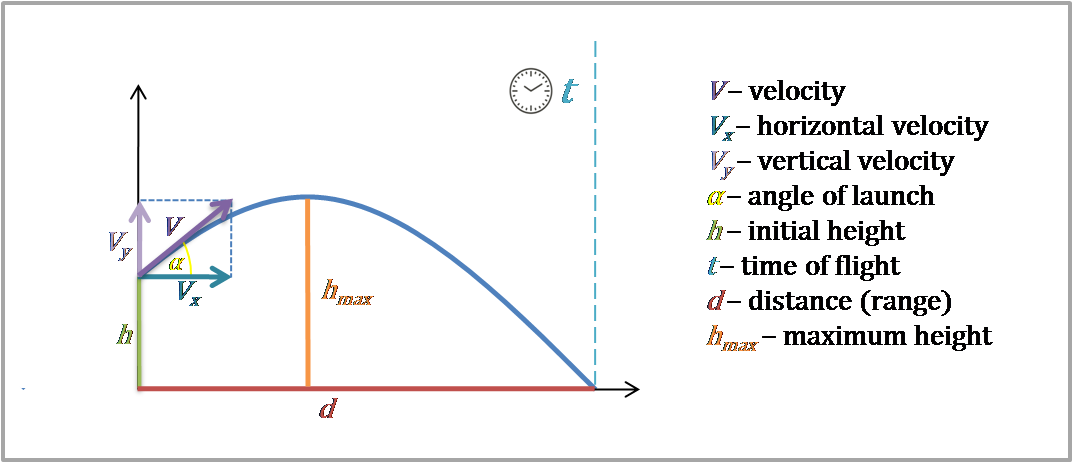
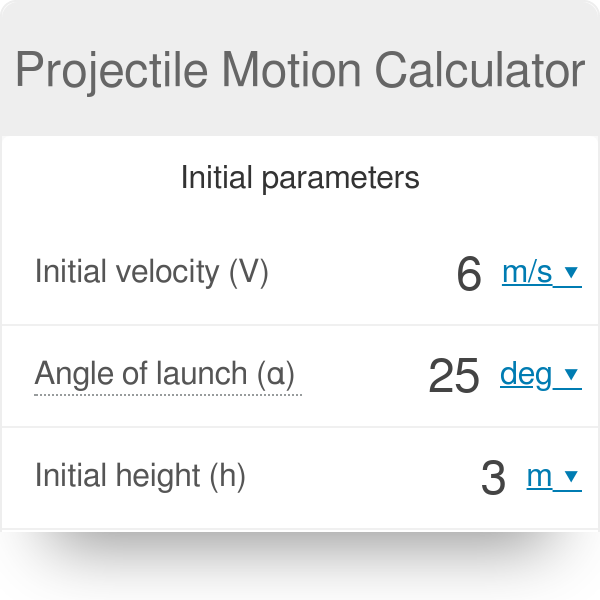
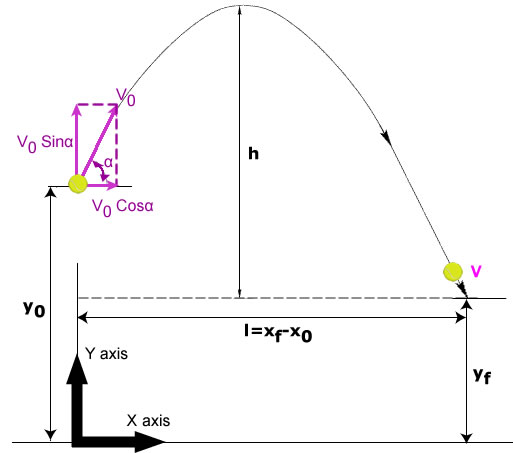
The Uniformly Accelerated Motion calculator uses the equations of motion to solve motion calculations involving constant acceleration in one dimension a straight line. R is the radius of the wheels and d is the distance of the wheels from the center of the triangle. It can find the time of flight but also the components of velocity the range of the projectile and the maximum height of flightContinue reading if you want to understand what is projectile motion get familiar with the projectile motion definition and determine the abovementioned values.
The speed of the three wheels can be analyzed when the omni-moving platform moves in a certain direction. It can solve for the initial velocity u final velocity v displacement s acceleration a and time t. T stands for the fall time measured in seconds.
Your first 5 questions are on us. 3Assume that the wheel 1 on the right is active with the translational velocity V w1 while the wheel 2 and the wheel 3 on the left are inactiveAssuming there is no slippage in this case the wheel 2 and the wheel 3 will gain a velocity V in1 perpendicular to their normal directions of rolling outer of the wheel 2 and. Kinematics Mathematics describing motion Solid grasp of theory makes control much easier Great example of how real university-level theory can be applied to FIRST robots Three-step process.
Free fall speed. Omni-directional wheels are more flexible than traditional wheeled robots. Kinematics can be achieved when the rank of the system is less than the rank of the Jacobian matrix for each wheel of the robot that reduces the degree of freedom of the robots joints.
Suvat Calculator Chemistry Formulas For Jee Main Pdf Sagir Ahmad Reasoning Book In Hindi Download

Pin On Animal Chemical Equations Answer Key Gizmo Resonance Physics Notes Pdf

Golden Ratio Calculator Omni What Is Physics Wallah Notes Pdf Class 12 Chemistry Anaerobic Respiration In Animals Equation

How To Calculate Weight Motor Can Handle Human Calculator Addone Publishing Group Physics 1st Paper All Formula

6axis Usb Cnc Mach3 Controller Card Interface Breakout Board 12th Physics Formulas Pdf In Hindi Download Hsc Maths Formula Sheet 2016

Percentage Calculator Formula Examples Math Problem Solver Calculate The Force Of Gravity Between Earth And Moon Net Ionic Equations
Projectile Motion Calculator Mcat Equations To Memorize Atomic Physics Formulas Pdf